Поиск по статьям:
Инжиниринг
Статистика

 | Просмотров: 4523
| Просмотров: 4523Многие давно привыкли к такому решению как распределенный ввод вывод, хотя называют его по разному, суть одна - для организации сбора сигналов используются удаленные от основного ПЛК модули, таким образом получается распределенная периферия. Сигналы, будь то дискретные или аналоговые, полученные (или выданные) на таких модулях, по сути отображаются в адресном пространстве основного ПЛК, аналогично выдаются сигналы с ПЛК, но при этом идет экономия проводом за счет того, что например на внешнем удаленном пульте от кнопок и ламп индикации провода идут буквально несколько сантиметров до модуля, а далее за счет организации и преобразования по сети (это может быть любая сеть и интерфейс, удовлетворяющий по скорости и надежности, например Ethernet или CAN). То есть каждый такой удаленный остров связан с ПЛК всего лишь кабелем связи, а не шлейфом из нескольких порой десятков кабелей. Обычно это не требующие супербыстродействия сигналы, тк все-таки сеть оказывает свое влияние задержкой передачи сигнала.
Распределенная периферия на ПЛК Delta DVP
На старых ПЛК как таковая распределенная периферия не выделялась в отдельный сегмент. Ее основные преимущества, такие как унифицированность заполнения адресного пространства, а так же сам процесс организации настройки не реализованы, то есть организация этой периферии лежит на руках программиста, для организации служат модули RTU (RTU-485 Удаленный модуль сбора данных, Modbus, RTU-EN01 Модуль удаленного сбора данных Modbus TCP, RTU-ECAT Модуль удаленного сбора данных EtherCAT, хотя в его случае все немного иначе). Связь с ними осуществляется командами чтения и записи по сети, адресное пространство формируется из общего (биты M регистры D). В принципе при таком подходе возможно проще брать ПЛК типа DVP12SE вместо RTU-EN01 и DVP14SS вместо RTU-485 тк цены у модулей не дешевая. RTU-ECAT это решение скорее с конца, точнее его разрабатывали, чтобы использовать недорогие модули от DVP для получения данных в ЧПУ или мощные ПЛК типа DVP-MC, то есть со стандартными ПЛК линейки DVP они врятли будут вам интересны.
Распределенная периферия на ПЛК AS200/AS300
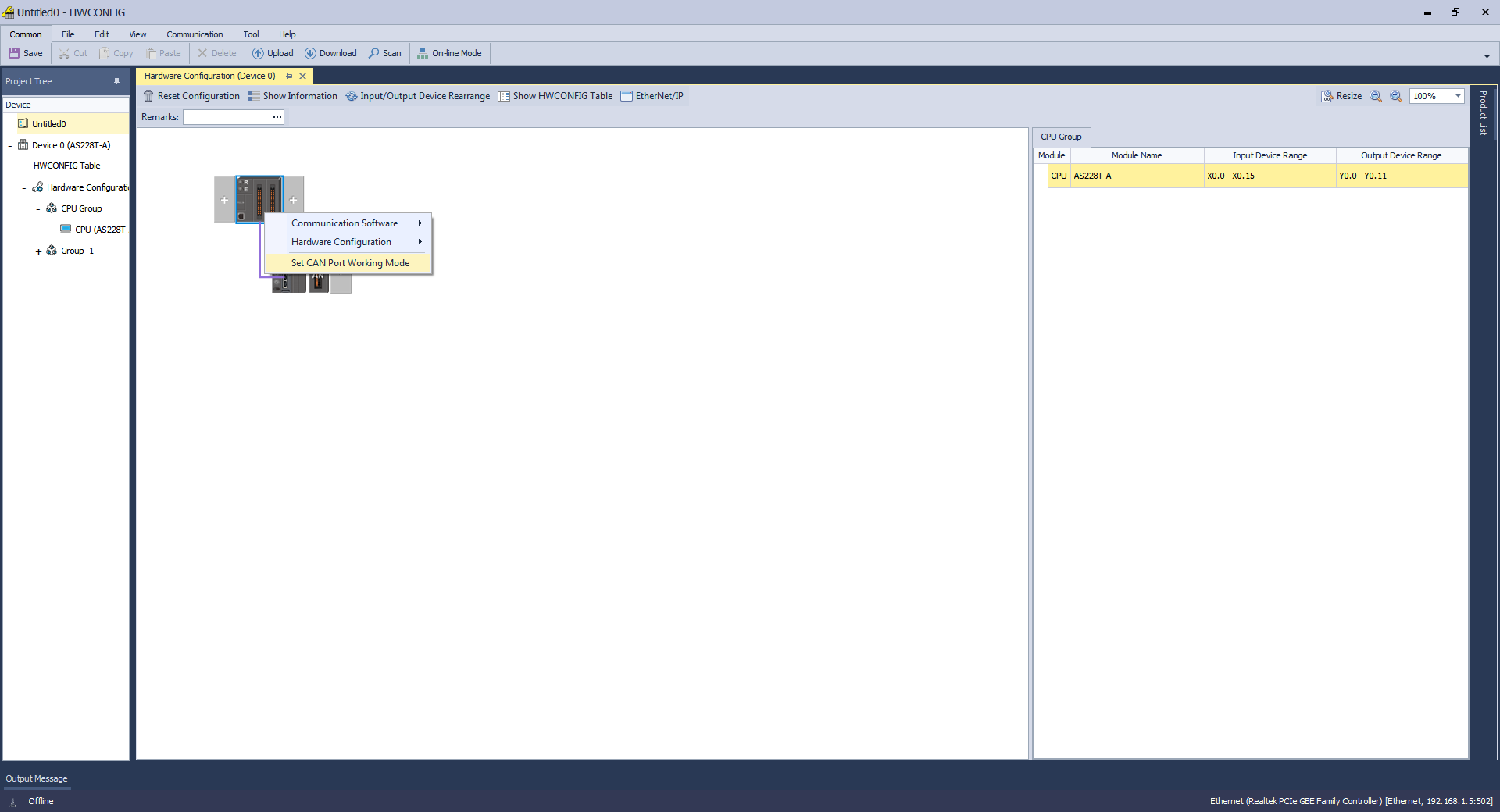
Вот тут уже интересно: тк ПЛК имеет аппаратную настройку, то можно заранее определить периферию, аппаратную настройку я приведу в конце, хотя это можно делать и вначале, для работы потребуется модуль AS00SCM-A и функциональная карта AS-FCOPM, которую нужно добавить в свободный слот (CARD2). Для того чтобы появился остров нужно вызвать HWConfig, где нажав правой кнопкой мыши вызвать контекстное меню над ПЛК и выбрать Set CAN Port Working Mode.
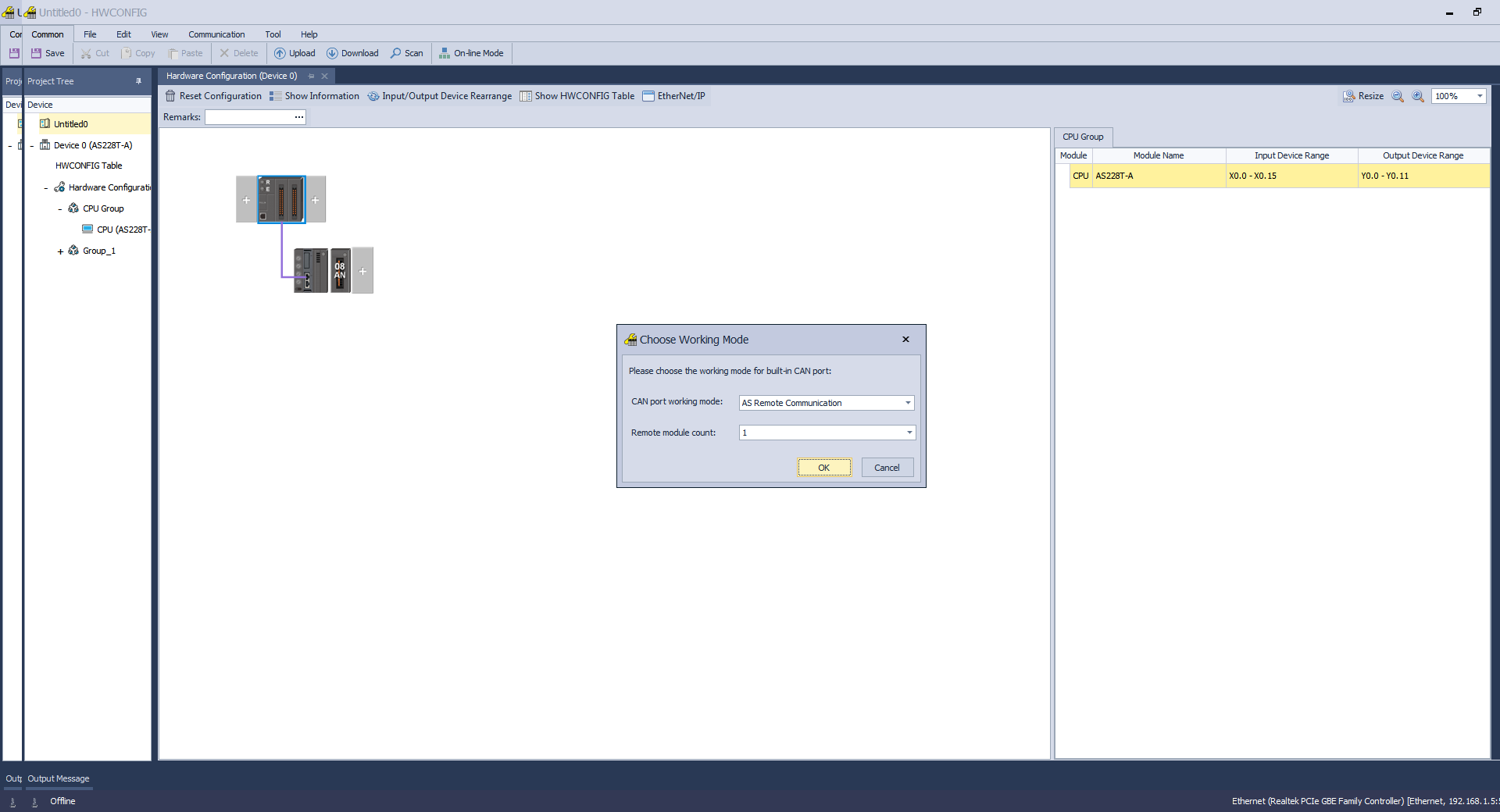
Это описание дано для ПЛК AS228, у которых порт CAN встроенный (стоит разъем внизу ПЛК, смотрит тоже вниз, разъем пружинный под провода), а для ПЛК AS300, нужно будет заранее сконфигурировать порт, то есть добавить в свободный слот (CARD2) плату AS-FCOPM, а потом уже выделив и наведя на нее выбрать для нее режим работы. Выбрав AS Remote Comunication, выберем и Remote module count - число островов. У меня для эксперимента был только один модуль, я выбрал 1.
Далее дважды щелкнем левой кнопкой мыши на ПЛК, получим доступ к настройкам и выберем пункт "Built-in CAN Comunication". (для AS300 это будет "Function Card2 Settings"
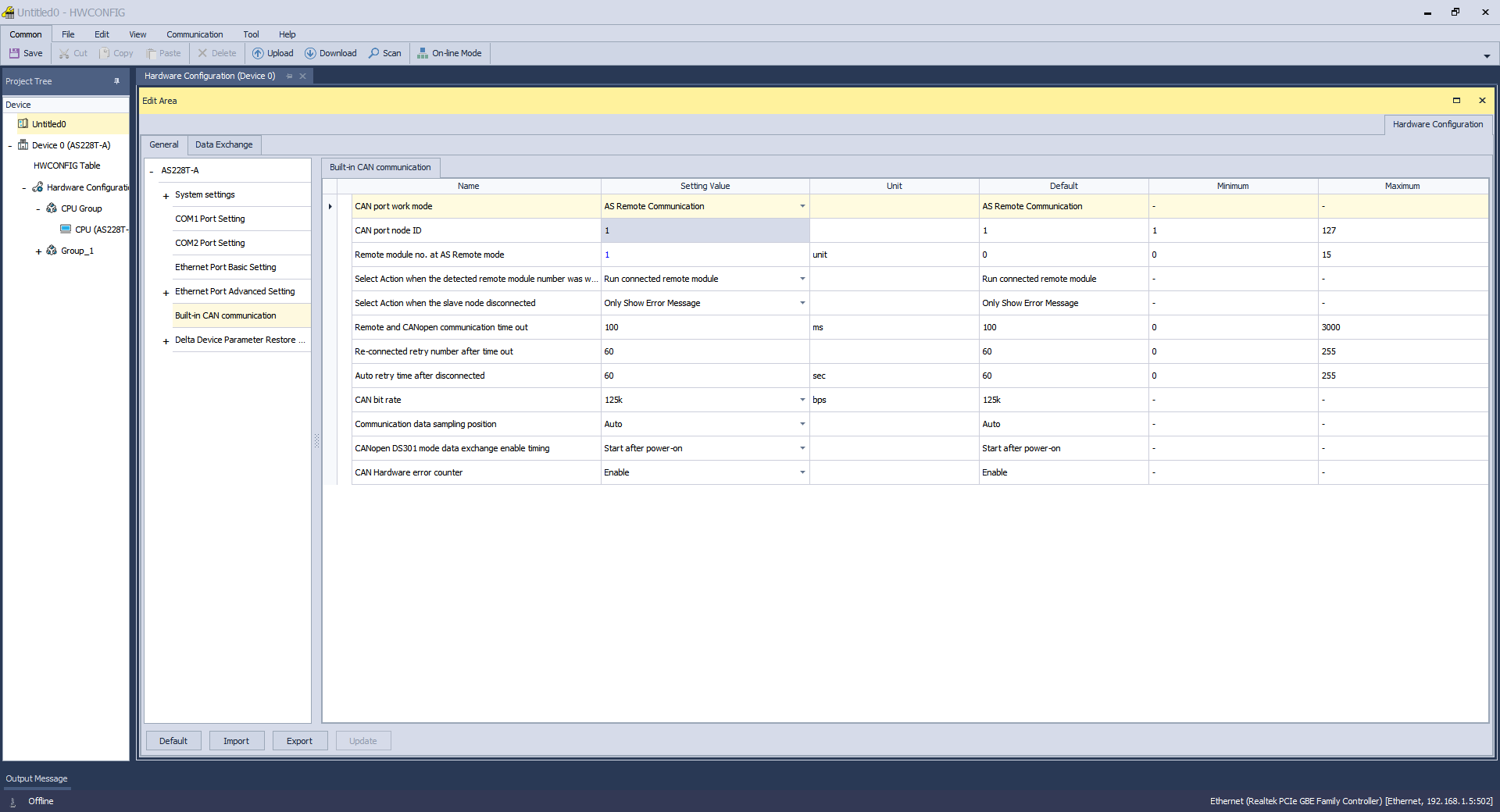
Там выбираются основные настройки соединения/связи.
Далее можно оценить труды нажав левой кнопкой мыши на модуле AS00SCM
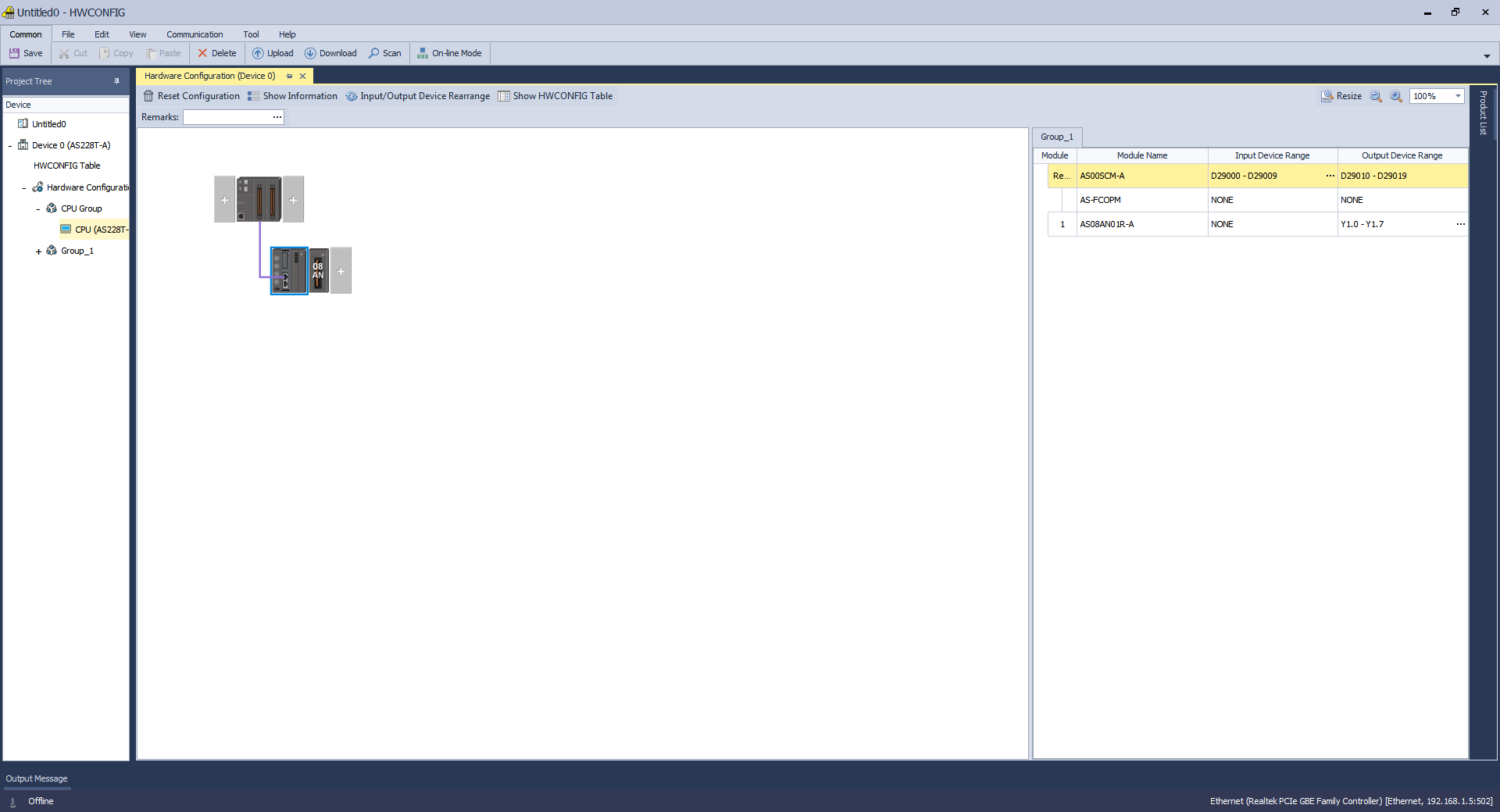
Справа приведено, в какие адреса будет отображаться пространство модуля и подключенных к нему модулей.
Аппаратная настройка модуля AS00SCM-A для работы как станции удаленного ввода вывода
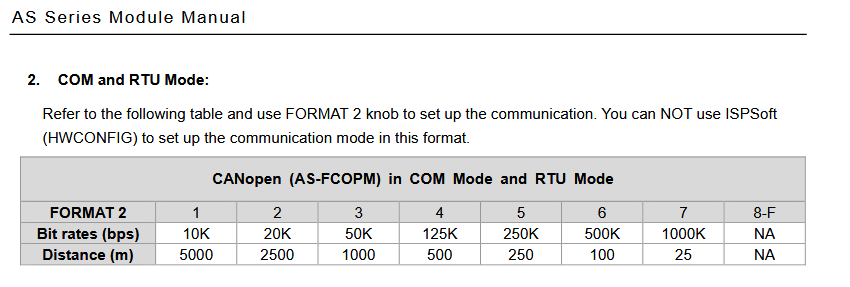
Для начала поясню, что модуль AS00SCM-A является универсальным коммуникационным модулем, то есть его можно ставить к ПЛК в одну шину (это я про внутреннюю), вставив в свободные слоты карты можно добавить в ПЛК порты связи. Для этого на модуле выбирается режим COM. (переключатель в левом нижнем углу модуля). По умолчанию же он стоит в RTU - это именно то, что нам нужно - RTU это станция удаленного ввода вывода. Далее нужно, как уже писал, вставить функциональную карту AS-FCOPM, которую нужно добавить в свободный слот, выбирается обязательно CARD2, это приведено в таблице в документации. Настройки, которые будут определять работы платы вводятся с помощью "вертушек" слева, ID2 определяет номер на шине, в нашем случае номер 1, FORMAT2 вводится в соответствии с настройками из таблицы (должны совпадать с настройками в HWConfig).
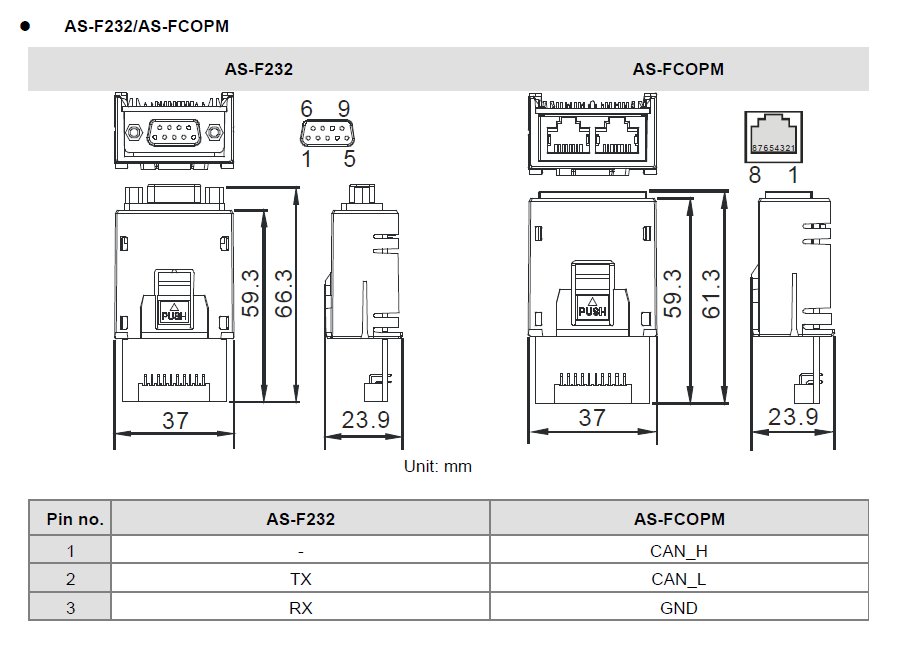
Для подключения к кабелю RJ45 используем следующую распиновку. Первый верхний разъем входящий, нижний исходящий.
Если станция имеет конечное положение (то есть дальше сеть заканчивается) можно переключить переключатель на плате AS-FCOPM (с обратной стороны) в положение терминального резистора.
Ну вот наверное и все по настройке, если все нормально индикатор Error на плате будет погашен, если моргает с интервалом полсекунды, проверьте настройки связи, проведите эксперимент сперва на низких настройках.